使用
面试
动作识别
极限编程
springcloud
el
lua metatable
JUC
全志
Linux命令
kmeans
分享功能
逆向
关联数组
edge
个人开发
防火墙
猜拳
数据探索
qt教程
增强现实
2024/4/11 15:57:47
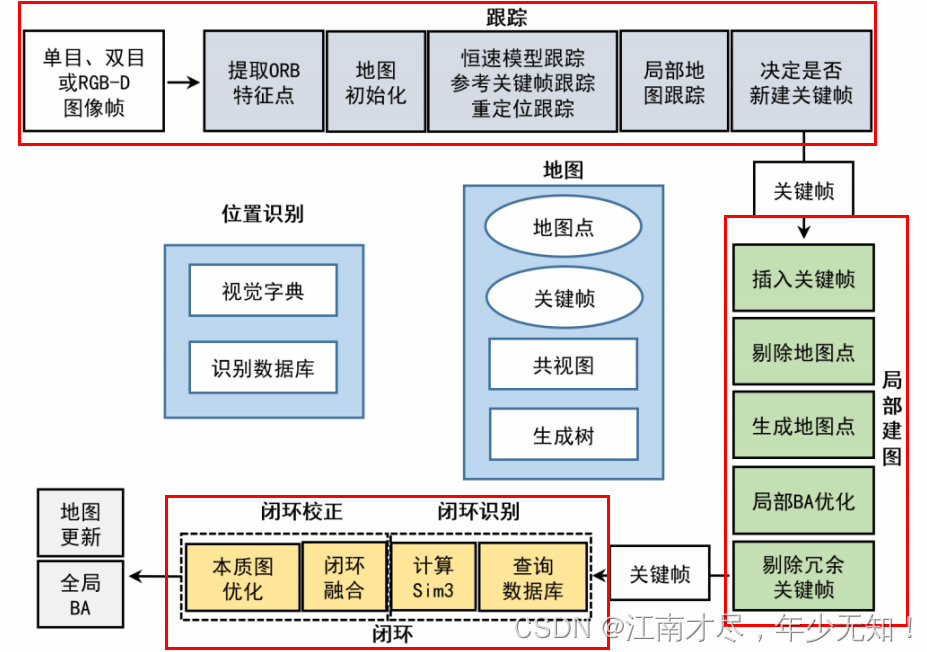
(01)ORB-SLAM2源码无死角解析-(04)单目追踪_总体框架讲解TrackMonocular→GrabImageMonocular
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(28) 双目Stereo相机立体匹配,SAD算法→深度求解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(45) EPnP 源代码分析(5)→ICP 求解相机位姿
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

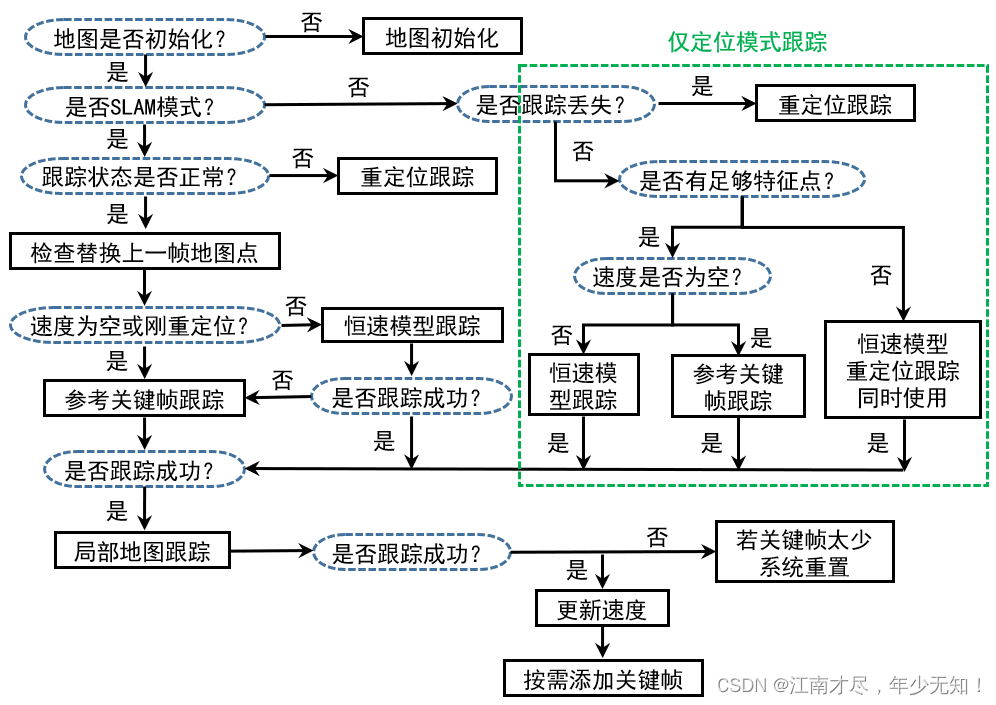
(01)ORB-SLAM2源码无死角解析-(48) 不同跟踪方法的对比、梳理完整跟踪流程→Tracking::Track()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(53) 闭环线程→了解闭环检测、主体框架讲解:LoopClosing::Run
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

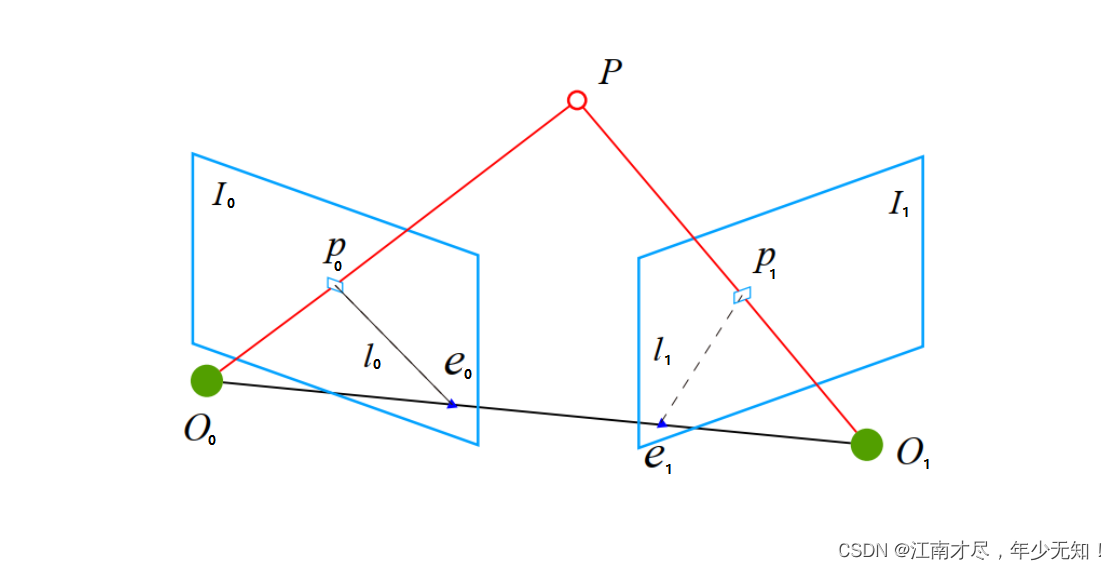
史上最简SLAM零基础解读(5) - Homography,Fundamental,Essential深入浅出→了解适用场景:共面、非共面、仅旋转
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言
通过文首的一系列博客,相信大家对于 Homography,Fundamental,Essential 矩阵已经有了一一定认知,比如 单应…
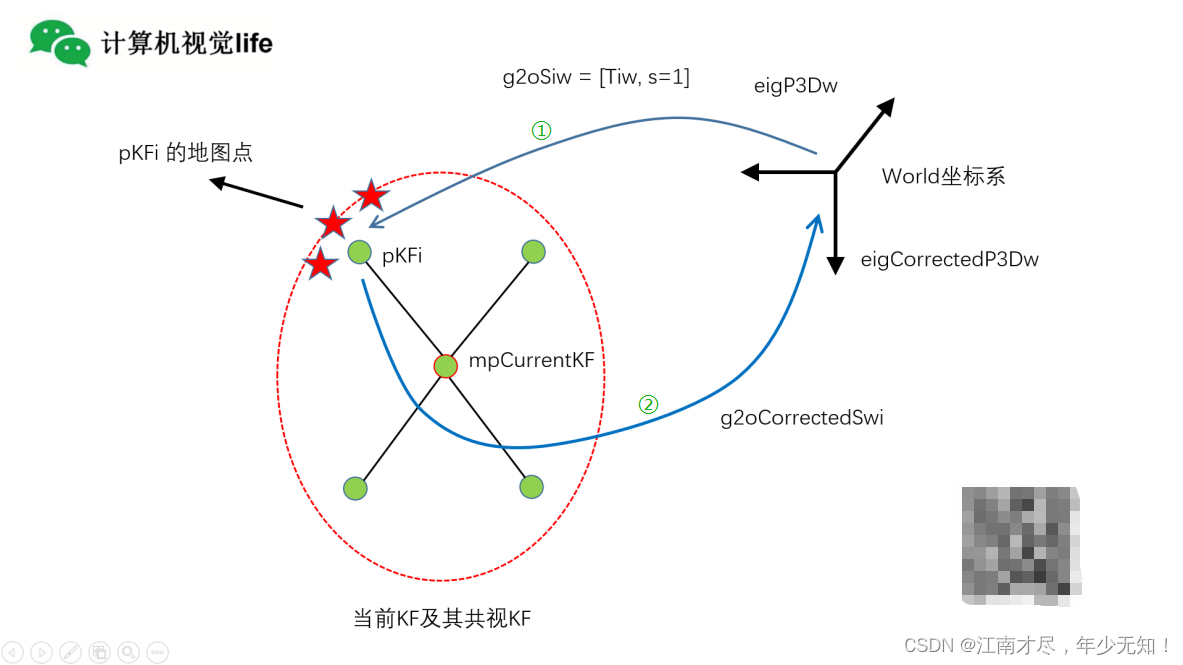
(01)ORB-SLAM2源码无死角解析-(61) 闭环线程→闭环矫正: CorrectLoop→全代码注释
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(02)Cartographer源码无死角解析-(15) Node::AddTrajectory()→回调函数之数据流向分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
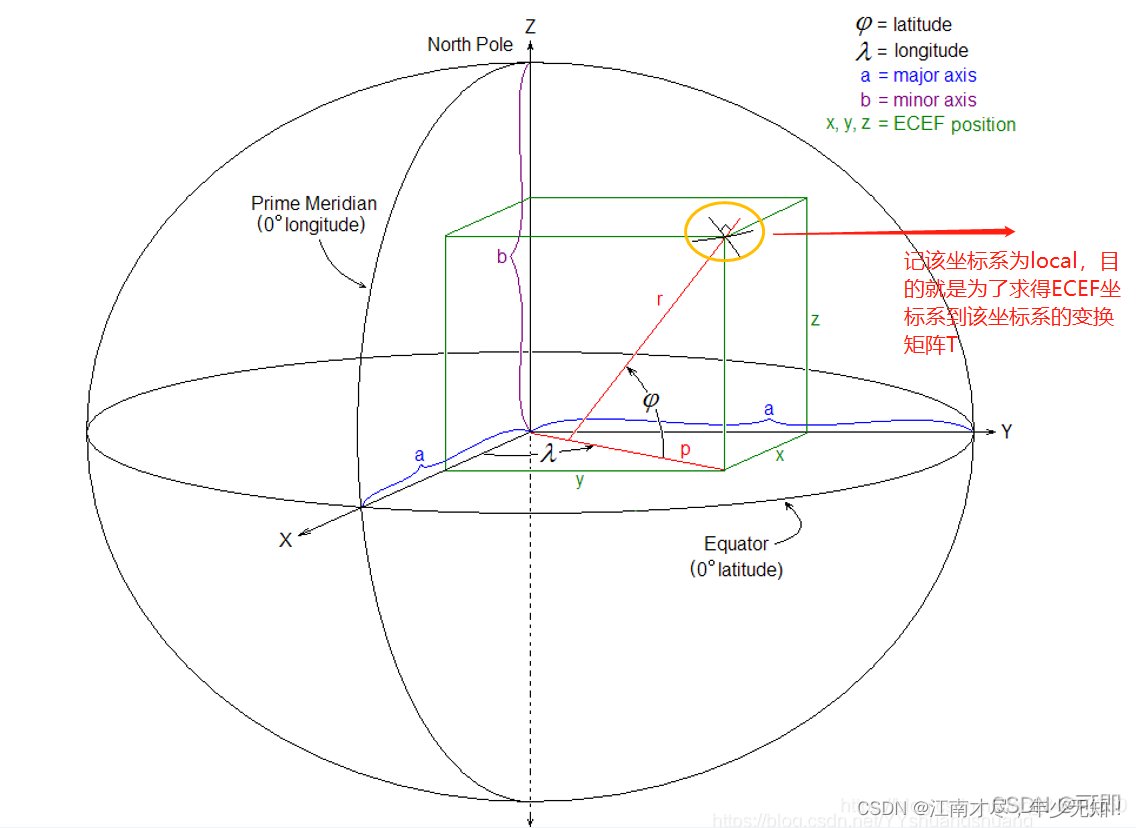
(02)Cartographer源码无死角解析-(18) SensorBridge→landmark、Imu、GPS 数据坐标系变换
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(14) Node::AddTrajectory()→订阅话题与注册回调函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(01)ORB-SLAM2源码无死角解析-(60) 闭环线程→闭环矫正: CorrectLoop→地图点融合、共视关系更新
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(32) ORB特征匹配→跟踪线程BoW加速匹配,关键帧特征点跟踪SearchByBoW()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(30) ORB特征匹配→词袋BoW(bag of words):简介,优劣势分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(47) 跟踪线程→局部地图跟踪TrackLocalMap():局部地图点过滤
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(11)ORBextractor::operator()→BRIEF描述子
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(59) 闭环线程→闭环矫正: CorrectLoop→位姿传播,地图点矫正
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(02)Cartographer源码无死角解析-(05) 程序运行常见错误与解决→模拟错误
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正…

(02)Cartographer源码无死角解析-(02) ROS基础讲解→记录编译过程及常用指令
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 …
(02)Cartographer源码无死角解析-(26) OrderedMultiQueue::Dispatch()→数据排序分发
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(01)ORB-SLAM2源码无死角解析-(21) 基本矩阵Fundamental→本质矩阵Essential 分解恢复 Rt
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(22) 特征点三角化、深度计算、三维点筛选
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(02)Cartographer源码无死角解析-(44) 2D栅格地图→ProbabilityGrid 与 ProbabilityToLogOddsInteger()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(46) 2D栅格地图→RayToPixelMask()与贝汉明(Bresenham)算法
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…
第一篇:概述、 目录、适用范围及术语 --- IAB/MRC《增强现实(AR)广告(效果)测量指南1.0 》
第一篇:概述、目录、适用范围及术语 - IAB与MRC及《增强现实广告效果测量指南1.0》
--- 我为什么要翻译美国IAB科技公司系列标准
翻译计划
第一篇概述—IAB与MRC及《增强现实广告效果测量指南》之目录、适用范围及术语第二篇广告效…

(02)Cartographer源码无死角解析-(48) 2D点云扫描匹配→扫描匹配基本原理讲解,代码总体框架梳理AddAccumulatedRangeData()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(17) SensorBridge→里程计数据坐标系变换与TfBridge分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(31) LocalTrajectoryBuilder2D::AddRangeData()→点云数据重力对齐,Z轴过滤
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…

工业互联网下的增强现实
工业互联网下的增强现实
1、 概述
增强现实(Augmented Reality,简称AR),增强现实技术也被称为扩增现实,AR增强现实技术是促使真实世界信息和虚拟世界信息内容之间综合在一起的较新的技术内容,其将原本在现…
(01)ORB-SLAM2源码无死角解析-(41) EPnP 源代码分析(1)→PnPsolver总体流程与思路
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(02)Cartographer源码无死角解析-(23) 传感器数据类型自动推断与数据利用率计算
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
哈佛大学商业评论 -- 第二篇:增强现实是如何工作的?
AR将全面融入公司发展战略!
AR将成为人类和机器之间的新接口!
AR将成为人类的关键技术之一!
请将此文转发给您的老板!
--- 本文作者:Michael E.Porter和James E.Heppelmann
虽然物理世界是三维的,但大…
第五篇:3.4 用户归因和受众(User attribution and audience) - IAB/MRC及《增强现实广告效果测量指南1.0》
翻译计划
第一篇概述—IAB与MRC及《增强现实广告效果测量指南》之目录、适用范围及术语第二篇广告效果测量定义和其他矩阵之- 3.1 广告印象(AD Impression)第三篇广告效果测量定义和其他矩阵之- 3.2 可见性 (Viewability)第四篇广…

管廊ar实景可视化巡检提升安全性
在科技日新月异的今天,智慧工地ar远程巡检交互系统应运而生,它是ar开发公司深圳华锐视点综合运用了AR增强现实、5G通信、人工智能、物联网以及GPS北斗定位等前沿技术,为企业打造了一套全新的数字化巡检解决方案。不仅解放了巡检人员的双手&am…
第七篇:3.6 其他评估考虑/4.审计指南/5. 通用报告规范/6.披露指南、参考标准及其他 - IAB/MRC及《增强现实广告效果测量指南1.0》
翻译计划
第一篇概述—IAB与MRC及《增强现实广告效果测量指南》之目录、适用范围及术语第二篇广告效果测量定义和其他矩阵之- 3.1 广告印象(AD Impression)第三篇广告效果测量定义和其他矩阵之- 3.2 可见性 (Viewability)第四篇 …
哈佛大学商业评论 --- 第三篇:真实世界中的增强现实
AR将全面融入公司发展战略!
AR将成为人类和机器之间的新接口!
AR将成为人类的关键技术之一!
请将此文转发给您的老板!
--- 本文作者:Michael E.Porter和James E.Heppelmann
虽然物理世界是三维的,但大…

(01)ORB-SLAM2源码无死角解析-(14) 地图初始化→单目初始化MonocularInitialization():尺度不确定性
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(02)Cartographer源码无死角解析-(36) PoseExtrapolator→AddImuData()、AddOdometryData()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(09) gflags与glog简介、及其main函数讲解
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…
(02)Cartographer源码无死角解析-(22) 传感器数据分发→CollatedTrajectoryBuilder
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(28) GlobalTrajectoryBuilder构建过程与数据转发前后端
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(01)ORB-SLAM2源码无死角解析-(44) EPnP 源代码分析(4)→PnPsolver::qr_solve():QR分解
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析-接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正…
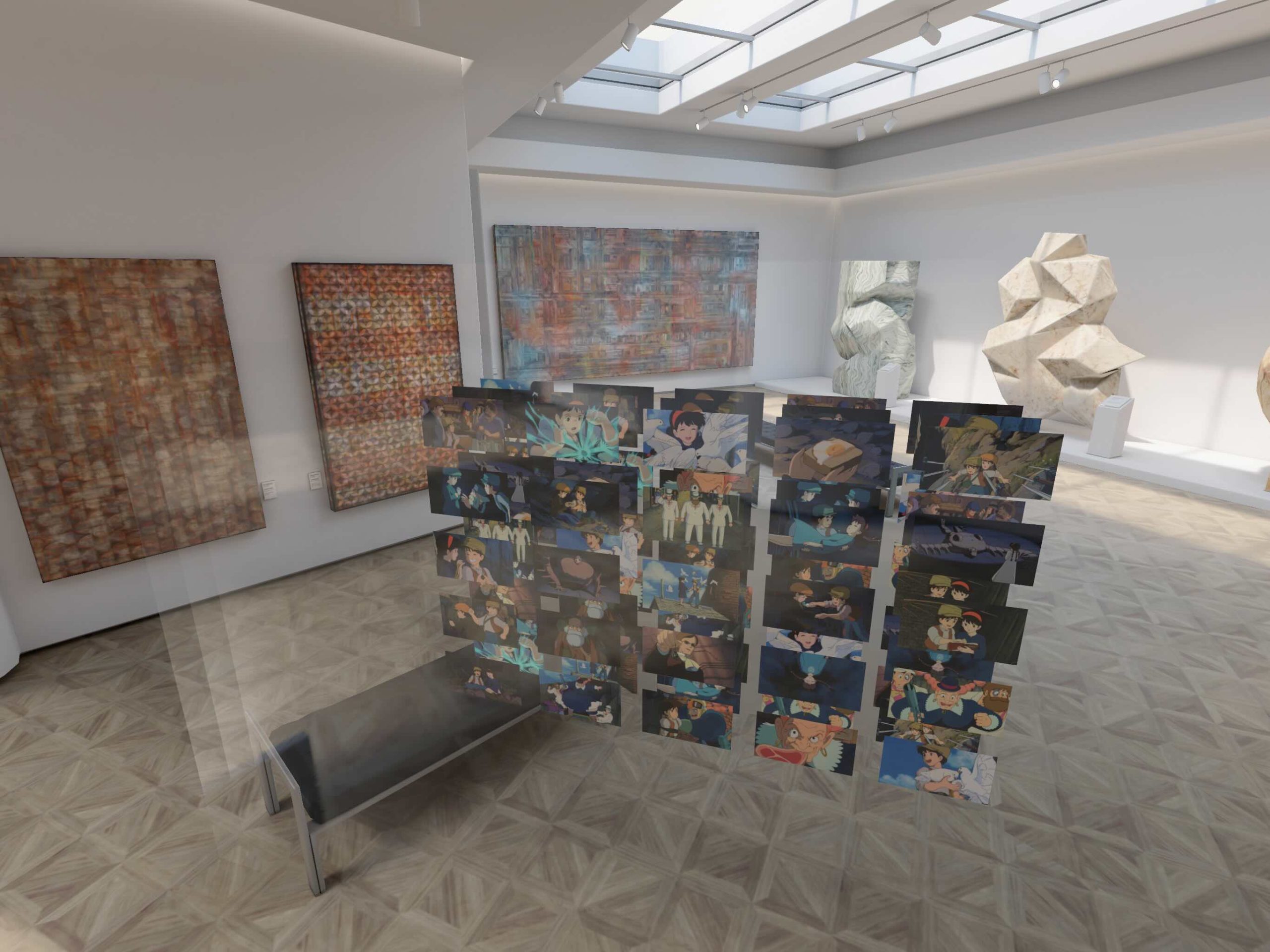
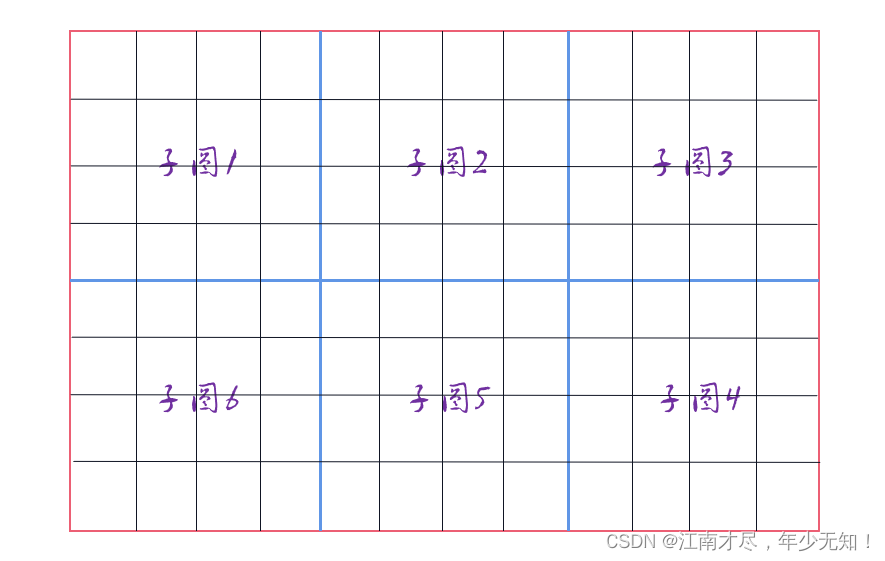
visionOS空间计算实战开发教程Day 10 照片墙
本例选择了《天空之城》的25张照片,组成5x5的照片墙)。首先我们在setupContentEntity方法中构建了一个纹理数组,将这25张照片添加到数组images中。其中封装了setup方法,借助于visionOS对沉浸式空间的支持,我们创建了三…

史上最简SLAM零基础解读(8.1) - 旋转矩阵、旋转向量、欧拉角推导与相互转换
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…

(01)ORB-SLAM2源码无死角解析-(27) 共视图、本质图、拓展图
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(02)Cartographer源码无死角解析-(42) 2D栅格地图→Submap、Submap2D、MapLimits
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(49) 2D点云扫描匹配→相关性暴力匹配1:SearchParameters
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…
(02)Cartographer源码无死角解析-(24) Collator类与数据队列OrderedMultiQueue简介
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

史上最简SLAM零基础解读(10.3) - g2o(图优化)→边(Edge)编程细节
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…
(01)ORB-SLAM2源码无死角解析-(49) 局部建图线程→MapPointCulling,CreateNewMapPoints
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析-接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正…
(01)ORB-SLAM2源码无死角解析-(34) 跟踪线程→初步了解跟踪线程,参考关键帧追踪TrackReferenceKeyFrame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(20) 分解Homography,恢复Rt→Faugeras SVD-based decomposition
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(02)Cartographer源码无死角解析-(47) 2D栅格地图→总体流程梳理与总结,及核心关键CastRays()讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(37) PoseExtrapolator→AddPose()、旋转向量(求导)变换成角速度
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
(02)Cartographer源码无死角解析-(34) LocalTrajectoryBuilder3D→3D点云数据处理,大致流程梳理
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…
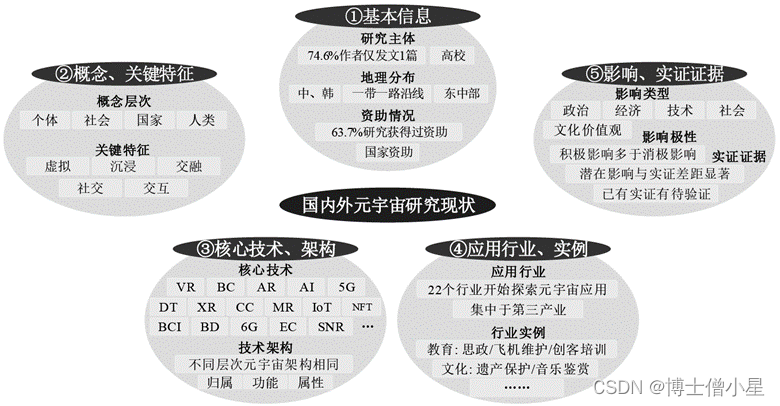
元宇宙是否为噱头?若不是,什么是元宇宙?他的概念、技术、应用和影响是什么?
文章来源:元宇宙的概念、技术、应用与影响——一项系统性文献综述 - 中国知网 (cnki.net) 摘要
[目的/意义]系统综述与分析当前国内外的元宇宙研究现状,有利于准确把握元宇宙发展方向,强化元宇宙基础研究,争取元宇宙建构权。[方法…
AR远程辅助技术应用到气象部门有何好处?
随着科技的不断发展,人类对于自然环境的理解和掌控能力也在不断提升。其中,AR(增强现实)技术的应用,为气象监控带来了革命性的变化。AR气象远程监控,就是将AR技术与气象监控相结合,通过虚拟与现实的融合,实…

苹果眼镜(Vision Pro)的开发者指南(2)
探索构成空间计算的基本要素:窗口、体积和空间,并了解如何使用这些元素构建引人入胜的沉浸式体验。将带你了解用于为visionOS创建应用程序的框架,并向你展示如何进行深度、规模和沉浸式设计。探索如何使用来自Apple的工具,如Xcode…
(01)ORB-SLAM2源码无死角解析-(29) ORB特征匹配→ORBmatcher,汉明距离(单目初始化为例)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

在图像中放置虚拟物体(python实现)
在图像中放置虚拟物体即是将图像作为背景,创建个虚拟三维物体投影到图像上。
本实验环境:OpenGL、pygame、python(安装见python配置pygame和OpenGL)
# -*- coding: utf-8 -*-
import math
import pickle
import sys
from pylab …
(02)Cartographer源码无死角解析-(16) SensorBridge→Rigid3(刚体变换)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(01)ORB-SLAM2源码无死角解析-(37) EPnP 算法原理详解→理论基础一:控制点选取、透视投影约束
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方…
(01)ORB-SLAM2源码无死角解析-(57) 闭环线程→计算Sim3:理论推导(2)求解R,使用四元数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(42) EPnP 源代码分析(2)→compute_pose():控制点选取,系数计算
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(18) SVD奇异值分解→求解Homography,Fundamental矩阵,了解矩阵自由度
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方中心提供了本人 联系…
(01)ORB-SLAM2源码无死角解析-(40) EPnP 算法原理详解→理论基础四:QR分解(豪斯霍尔德Householder变换)
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下: (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/123092196 文末正下方中心提供了本人 联系…
(01)ORB-SLAM2源码无死角解析-(38) EPnP 算法原理详解→理论基础二:分情况求得beta初始解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/de…
(02)Cartographer源码无死角解析-(36) PoseExtrapolator→AddImuData()、TrimOdometryData()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

快速构建一款 AR App 入门指南
近期,苹果公司推出了的 ARKit 增强现实平台,为众多开发者带了一个惊喜,同时为移动 AR 的解决方案及平台提供了很多帮助。作为一名 AR 开发者,我们不仅无法忽视苹果所做的事情,还需要不断学习了解。本文旨在探讨已发布的…
(02)Cartographer源码无死角解析-(38) PoseExtrapolator→AdvanceImuTracker()、ImuTracker姿态推断
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…

Unity3D AR开发之Vuforia入门学习
引言:2016年的AR游戏Pokemon GO火遍全球(除了中国),让我第一次了解到AR的世界。神奇的虚拟对象出现在现实世界中,感觉小时候的游戏王这类的动画可以成为现实。 最近小生学习了高通的Vuforia,本篇着重介绍入门操作。开发版本&#…
(02)Cartographer源码无死角解析-(73) 2D后端优化→OptimizationProblem2D-landmark残差细节分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…
(01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(33) ORB特征匹配→局部建图BoW加速匹配,三角化SearchForTriangulation
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(43) EPnP 源代码分析(3)→find_betas_approx(),gauss_newton()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(02)Cartographer源码无死角解析-(19) SensorBridge→雷达点云数据帧处理与坐标系变换(涉及函数重载)
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 …
增强现实(AR)在广告中的力量
The Power of AR in Advertising 写在前面
增强现实(AR -Augmented Reality)是指借助软件、应用程序和智能手机、平板电脑或耳机等设备,为日常生活添加视觉和音频元素的技术。如今,品牌和广告商可以在营销活动中使用AR࿰…
(02)Cartographer源码无死角解析-(21) MapBuilder→AddTrajectoryBuilder()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
如何在社交媒体中使用增强现实来提高客户参与度?
目录
1. 增强现实在社交媒体中的应用是如何发展的
2. 社交媒体营销和广告中的增强现实
3. 社交媒体上的增强现实滤镜和镜头
4. 社交媒体平台上的增强现实购物
5. 利用社交媒体的增强现实事件和品牌激活
6. 增强现实在社交媒体中的未来是什么
7. 社交媒体中的增强现实常见…
第六篇: 3.5 性能效果 (Performance)- IAB/MRC及《增强现实广告效果测量指南1.0》
翻译计划
第一篇概述—IAB与MRC及《增强现实广告效果测量指南》之目录、适用范围及术语第二篇 广告效果测量定义和其他矩阵之- 3.1 广告印象(AD Impression)第三篇 广告效果测量定义和其他矩阵之- 3.2 可见性 (Viewability…
(02)Cartographer源码无死角解析-(26) 阻塞队列BlockingQueue(),与OrderedMultiQueue成员函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(01)ORB-SLAM2源码无死角解析-(09)ORBextractor::operator()→FAST关键点均匀化
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

基于OpenCV的增强现实--初级demo
相关包安装
1.pygame的安装
打开命令行cmd输入下面的指令即可安装:
pip install pygame2.pyOpenGL的安装
如果直接用pip安装的话可能后面运行demo时会报错,网上说OpenGL装的是默认32位版本,而电脑是64位的,所以就会报错。&…

(02)Cartographer源码无死角解析-(67) 2D后端优化→FastCorrelativeScanMatcher2D -分支定界算法1
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…
AR和VR如何改变客户体验?
How AR and VR are transforming customer experiences? How AR and VR are transforming customer experiences AR和VR如何改变客户体验 AR and VR technology was largely expedited by the past pandemic with at least 93.3 million and 58.9 million users r…
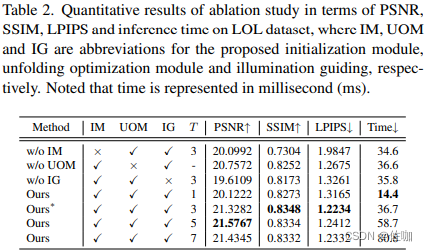
暗光增强——URetinex-Net网络推理测试
目录 一、URetinex-Net网络二、源码包三、测试3.1 修改参数3.2 测试结果 四、推理速度五、总结 一、URetinex-Net网络
URetinex-Net 设计了三个基于学习的模块,分别负责数据相关的初始化、高效的展开优化和用户指定的光照增强。由于 URetinex-Net 的推理速度非常快…
增强现实python
本博文用来记录使用python实现增强现实
增强现实技术,即实时地计算摄影机影像的位置及角度并加上相应图像、视频、3D模型的技术,这种技术的目标是在屏幕上把虚拟世界套在现实世界并进行互动。
主要工作:实现动态的放置虚拟模型,…
第三篇:3.2 广告可见性 - IAB与MRC及《增强现实广告效果测量指南1.0》
翻译计划
第一篇 概述—IAB与MRC及《增强现实广告效果测量指南》之目录、适用范围及术语第二篇 广告效果测量定义和其他矩阵之- 3.1 广告印象(AD Impression)第三篇 广告效果测量定义和其他矩阵之- 3.2 可见性 (Viewability…
(02)Cartographer源码无死角解析-(16) SensorBridge→回调函数之数据流向分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-接如下(有兴趣的朋友可关注计算机视觉life 进行学习): (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(02)Cartographer源码无死角解析-(56) 2D后端优化→class MapById、MapById::lower_bound
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…

(02)Cartographer源码无死角解析-(54) 2D后端优化→PoseGraphInterface、PoseGraph、PoseGraph2D::AddNode()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
史上最全slam从零开始-总目录
讲解关于slam一系列文章主要分为以下几个板块,其中的序列号代表其学习难度,入门学员建议从01开始学习,相同序列号表示其难度相当 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式…
(01)ORB-SLAM2源码无死角解析-(65) BA优化(g2o)→闭环线程:Optimizer::OptimizeEssentialGraph→本质图优化
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(52) 局部建图线程→剔除关键帧KeyFrameCulling()、整体线程梳理
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(19) 重投影误差,卡方检验→CheckFundamental,CheckHomography
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(02)Cartographer源码无死角解析-(69) 2D后端优化→线程池深入追踪、问题、困惑梳理,知识点小结
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…

visionOS空间计算实战开发教程Day 8 附属视图和动画
本节我们开始初探在visionOS中添加动画效果,我们的入口文件和ContentView和Day 6中并没有什么区别,所以重点来看ViewModel和ImmersiveView。
首先是ViewModel.swift文件:
import SwiftUI
im…

(01)ORB-SLAM2源码无死角解析-(50) 局部建图线程→流程以及处理新关键帧:ProcessNewKeyFrame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(10)ORBextractor::operator()→灰度质心法
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
史上最简SLAM零基础解读(3) - 白话来说SVD奇异值分解(1)→原理推导与奇异值求解举例
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言
这篇博客,主要使用最通俗的语言来讲解SVD奇异值分解,通过该篇博客,将知道 SVD 的来龙去脉&…
(02)Cartographer源码无死角解析-(39) PoseExtrapolator→ExtrapolatePose()、ExtrapolatePosesWithGravity() 等成员函数
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
(02)Cartographer源码无死角解析-(12) Node类初探→构造函数与开始轨迹
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文 末 正 下 方 中 心 提…

史上最简SLAM零基础解读(10.2) - g2o(图优化)→顶点 (Vertex)编程细节
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…

史上最简SLAM零基础解读(10.4) - g2o(图优化)→示例代码讲解(slam十四讲第二版为例)
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 文末正下方中心提供了本人联系方式,点击本人照片即可显示WX→官方认证{\color{blue}{文末正下方中心}提供了本人 \color{red} 联系方式,\color{blue}点击本人照片即可显示WX→官方认证}文末正…
(01)ORB-SLAM2源码无死角解析-(15) 单目初始化MonocularInitialization()→Initializer
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…

(01)ORB-SLAM2源码无死角解析-(16) 单目初始化Initializer→八点发求解Homography矩阵
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(05) Tracking::Tracking()与 Frame::Frame()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(24) 单目SFM地图初始化→CreateInitialMapMonocular()-细节分析:尺度不确定性
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
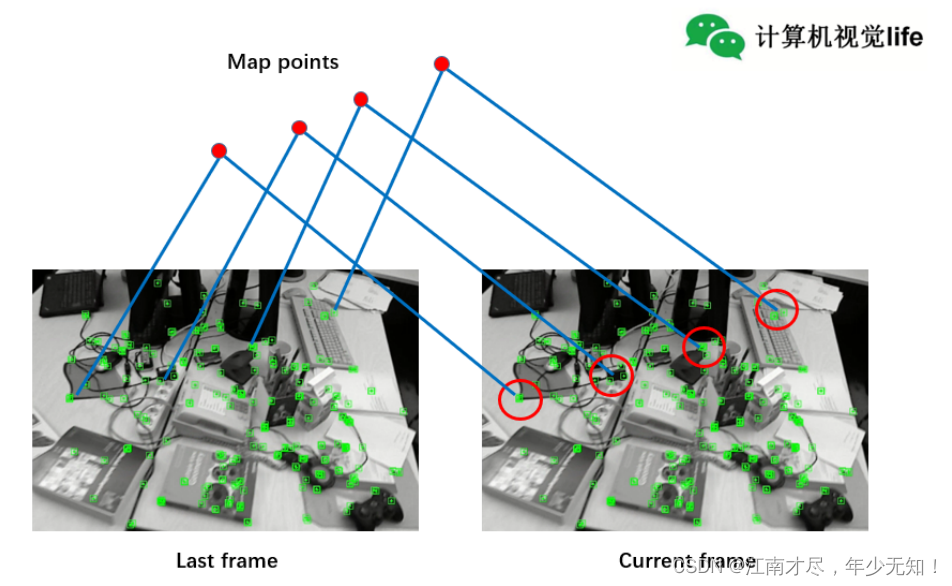
(01)ORB-SLAM2源码无死角解析-(35) 跟踪线程→恒速模型跟踪当前普通帧TrackWithMotionModel()
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
史上最简SLAM零基础解读(1) - 旋转平移矩阵→欧式变换推导
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言(线性变换)
该篇博客主要讲解一个 slam 中最基础的几个东西,那就是旋转矩阵,缩放矩阵以及偏移矩阵。本人会做…
(02)Cartographer源码无死角解析-(10) 配置文件加载1→主体框架分析LoadOptions()
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 …
(01)ORB-SLAM2源码无死角解析-(25) 关键帧KeyFrame→判断系统目前是否需要关键帧
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
(01)ORB-SLAM2源码无死角解析-(23) 单目SFM地图初始化→CreateInitialMapMonocular()-总体流程
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解的(01)ORB-SLAM2源码无死角解析链接如下(本文内容来自计算机视觉life ORB-SLAM2 课程课件): (01)ORB-SLAM2源码无死角解析-(00)目录_最新无死角讲解:https://blog.csdn.net/weixin…
史上最简SLAM零基础解读(3) - 白话来说SVD奇异值分解(2)→超定方程求解,最小奇异值特征为最优解
本人讲解关于slam一系列文章汇总链接:史上最全slam从零开始 有兴趣的朋友可以加微信 17575010159 相互讨论技术 - 文末公众号也可关注 一、前言
在讲解超定方程求解之前,以及为什么最小奇异值对应的特征特征向量为最优解之前,我们需要知道以下知识&…
(02)Cartographer源码无死角解析-(58) 2D后端优化→PoseGraph2D::AppendNode()细节分析
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末…
三维数字沙盘交互大数据可视化GIS地理信息系统第十课
三维电子沙盘交互无人机倾斜摄影大数据可视化GIS地理信息系统第十课
设置system.ini 如下内容 Server122.112.229.220 userGisTest Passwordchinamtouch.com
该数据库中只提供 成都市火车南站附近的数据请注意,104.0648,30.61658
在SDK中自带了一个自定义的基础面…

visionOS空间计算实战开发教程Day 9 打造“任意门”
我们在Day 8中演示了attachment的实现,本节的知识点是portal。portal相当于哆啦A梦里的任意门,它让我们可以打开另一个世界,这个世界独立于当前的世界,具有单独的光照系统并且由portal几何图形进行遮罩。
要创建portal&a…
(02)Cartographer源码无死角解析-(71) 2D后端优化→OptimizationProblem2D::Solve() - 优化准备工作,参数块
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…
(02)Cartographer源码无死角解析-(72) 2D后端优化→OptimizationProblem2D-约束残差、landmark残差
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文末正下方中心提供了本…

(02)Cartographer源码无死角解析-(75) 2D后端优化→整体复盘,理解后端优化核心思想
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…

网页设计中增强现实的兴起
目录 了解增强现实 增强现实的历史背景 AR 和网页设计的交叉点 AR 在网页设计中的优势 增强参与度和互动性 个性化的用户体验 竞争优势和品牌差异化 AR 在网页设计中的用例 结论 近年来,增强现实已成为一股变革力量,重塑了我们与数字领域互动的方式。它被…
(02)Cartographer源码无死角解析-(74) 2D后端优化→OptimizationProblem2D-里程计、local位姿、GPU残差
讲解关于slam一系列文章汇总链接:史上最全slam从零开始,针对于本栏目讲解(02)Cartographer源码无死角解析-链接如下: (02)Cartographer源码无死角解析- (00)目录_最新无死角讲解:https://blog.csdn.net/weixin_43013761/article/details/127350885 文…